Lehner Salzstreuer Steuerung
Für einen Lehner EisBär soll ein eigenentwickeltes Bedienpanel erstellt werden.
Folgende Funktionen soll dieses übernehmen:
Digitale Eingänge:
- Schleuderantrieb ein (Schalter)
- Drehzahlaufnehmer Schleudertellerdrehzahl (Impulsgeber)
Analoge Eingänge:
- Solldrehzahl Schleudermotor (Poti)
- Stromaufnahme Schleudermotor
- Stromaufnahme Rührwerkmotor
Digitale Ausgänge:
- Öffnen / Schließen Schiebermotoren über 2 Relais
- Rührwerkmotor ein/aus bzw. umpolen über 2 Wechsler-Relais
Analoge Ausgänge:
- Sollwert Drehzahl Schleudermotor (PWM)
HMI:
- Anzeige von Klappenzustand (Auf/Zu) sowie Soll/Istdrehzahl per LCD- oder OLED-Display
Steuerung:
- Automatisches Öffnen der Klappenantriebe sowie Rührwerksmotor bei Einschalten des Schleudermotors
- Nachlauf des Schleudermotores nach Schließen des Klappenantriebs
- Abschalten des Rührwerksmotors bei geschlossener Klappe
- Überwachung des Motorstroms beider Motoren
- Periodisches Nachregeln der Klappenantriebe
Regelung:
- Regelung des Istwerts Schleudermotor, Rückführung über Impulsaufnehmer an Schleuderteller
Hardware:
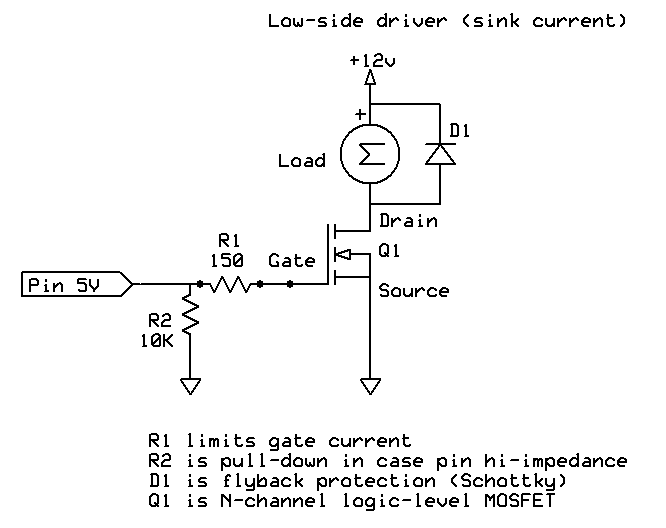
- Regelung des Motors (Brushed) evtl. über fertigen Modellbau-Fahrtregler (Flugregler), Ansteuerung per PWM über servo.h Library. Evtl. aber auch einfach über Mosfet (IRL3803), Freilaufdiode über den Motor und diesen über Optokoppler per PWM fahren
- Schalten des Rührwerkmotors und der beiden Klappenantriebe über Relais, dafür Treiberstufen vorsehen, evtl. ein ULN2003. Fertige Relaisplatine mit 4 Relais kommt für wenig Geld vom Chinesen.
- Strommessung der Motoren über Hallsensoren, z.B. ACS715
Technische Daten:
Drehzahl Streuteller: 70-660U/min
Leistung Rührwerksmotor: 150W
Leistung Streutellermotor: 60W
Schema Mosfet für Streutellermotor. Hier mit einem Logic Level Mosfet, und ohne Optokoppler.
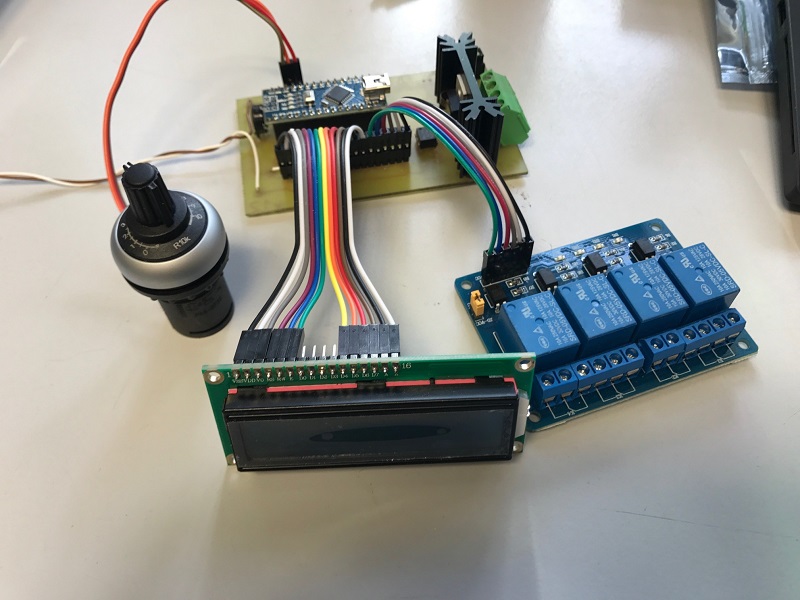
Zwischenstand 10/2017:
Update 09/2018
Viel ist nicht passiert. Hier nur einige Bilder:
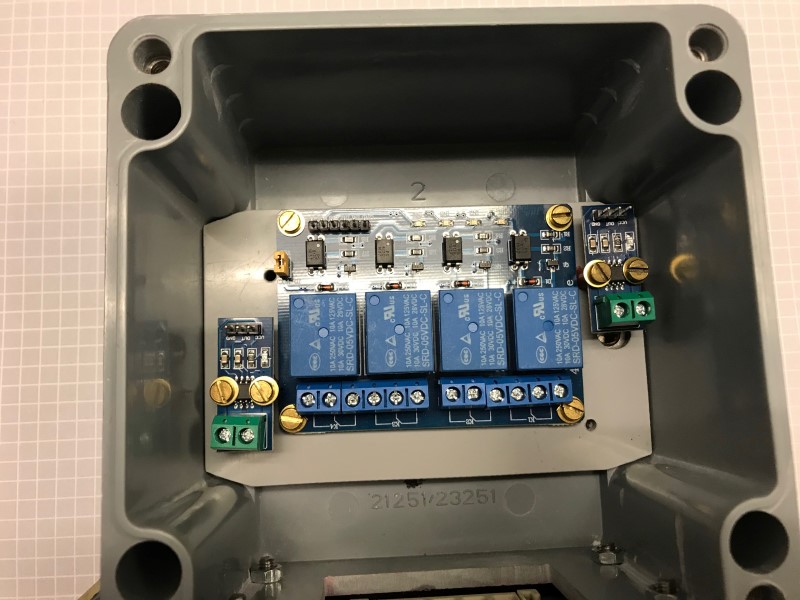
Relaisplatine und 2x Strommessung
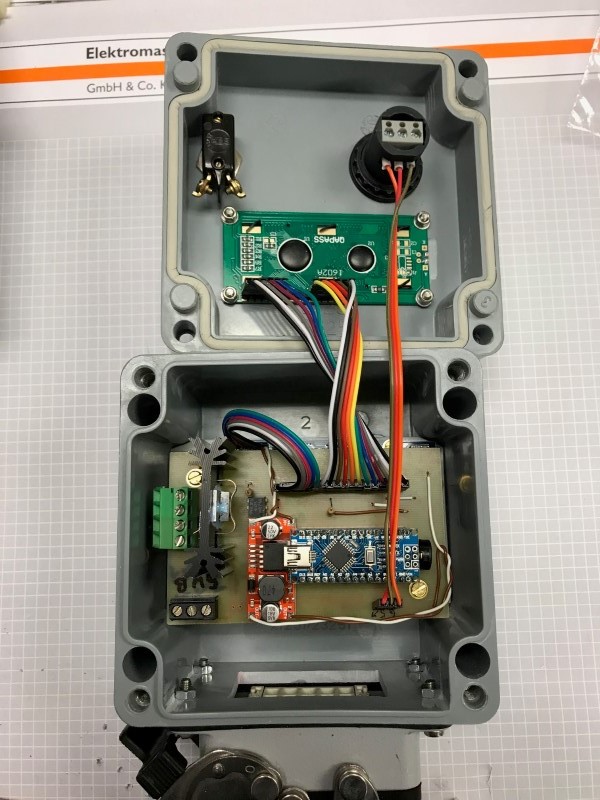
Front (ohne Menütasten)

Update 10/2018

Mittlerweile steht die Hardware grundsätzlich. Die Steuerung bekommt noch zwei Wechsler-Relais für den Rührwerksmotor verpasst, damit die China-Relaiskarte nicht direkt den Motor schalten muss.
Im Moment wird der Sketch für die Drehzahlerfassung programmiert, dafür wurde in abgeänderter Form (8 Impulse pro Umdrehung, keine serielle Kommunikation) dieser Sketch verwendet.
Die Erfassung liefert so plausible Werte.
Bisher wird ebenfalls alle 100 Impulse, also alle 12,5 Umdrehungen der Wert geupdated. Das ist sicherlich zu wenig, um auf Änderungen zu reagieren. Wird bei Gelegenheit also runtergeschraubt.
Anschließend folgt die Programmierung des PID-Reglers zur Drehzahlkonstanthaltung.